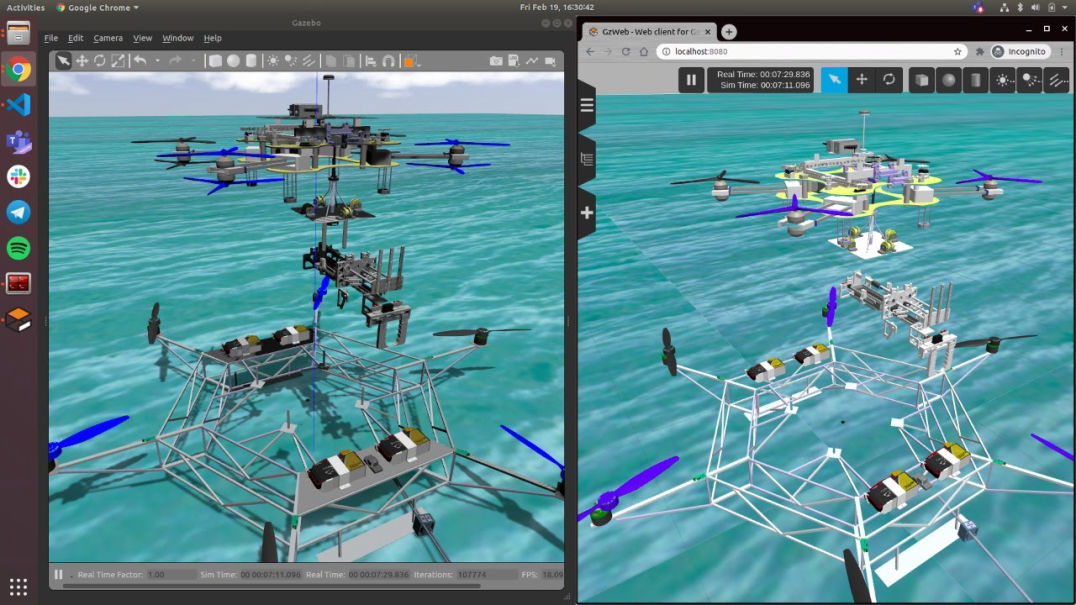
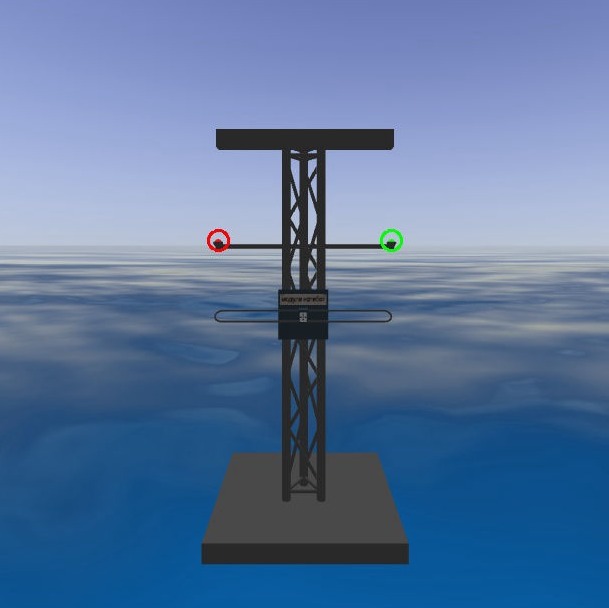
Gazebo Simulation Environment
We have used Gazebo 9 as our primary 3D simulator backed by ROS Melodic. Gazebo utilizes the high-performance physics engine ODE (Open Dynamics Engine). It provides a realistic rendering of environments, including high-quality lighting, shadows, and textures.