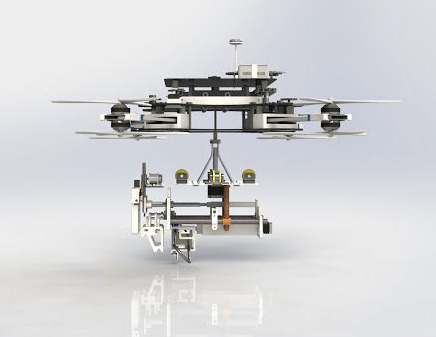
The Mothership
The mothership is the primary drone that carries the secondary daughter drone. It is an autonomous 25 Kg hexacopter with an integral cage-like structure. The mothership will deploy the daughter drone at the mast and continue its way homeward to complete the mission in 9 minutes.